Brazo Robótico
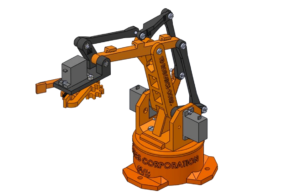
El brazo robótico didáctico de 4 grados de libertad es una herramienta diseñada para estimular el aprendizaje y la creatividad en estudiantes interesados en el campo de la robótica. Este dispositivo proporciona una experiencia práctica, permitiendo a los estudiantes adquirir conocimientos básicos de electrónica y programación mientras construyen, personalizan y controlan un brazo robótico.
En resumen, el brazo robótico didáctico de 4 grados de libertad ofrece a los estudiantes una oportunidad única para aprender sobre electrónica y programación, al mismo tiempo que estimula su creatividad y les permite adquirir habilidades prácticas en el campo de la robótica. Este dispositivo es una herramienta valiosa para aquellos que deseen explorar la emocionante y en constante evolución área de la tecnología robótica.







Versiones
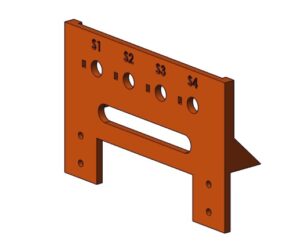
Versión Básica, consiste en la estructura impresa en 3D del brazo robótico 3DRC, ideal para aquellos que cuenten con microcontroladores y servomotores.

Versión Básica, consiste en la estructura impresa en 3D del brazo robótico 3DRC, ideal para aquellos que cuenten con microcontroladores y servomotores.

Versión Completa, consiste en el brazo robótico 3DRC, con todos los componentes necesarios para una rapida implementacion.

Versión Plus, es el modelo del brazo robótico 3DRC más completa de su linea, ideal para los amantes de la robótica.

-
 XL4015 convertidor de voltaje$81.20
XL4015 convertidor de voltaje$81.20 -
 Cable Dupont 20cm$46.40
Cable Dupont 20cm$46.40 -
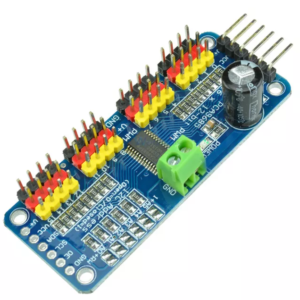 Módulo controlador de servomotores PCA9685$185.60
Módulo controlador de servomotores PCA9685$185.60 -
 Servomotor SG90$63.80
Servomotor SG90$63.80 -
 Servomotor MG995$139.20
Servomotor MG995$139.20 -
 Servomotor MG90S$102.00
Servomotor MG90S$102.00 -
 Uno R3 microcontrolador + cable USB$232.00
Uno R3 microcontrolador + cable USB$232.00 -
 Batería 18650 Recargable Litio$52.20
Batería 18650 Recargable Litio$52.20
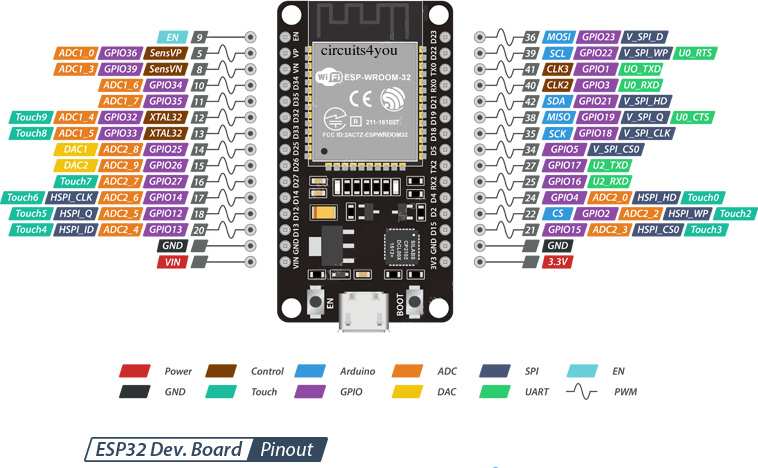
Diagrama Eléctrico
Código
#include <Servo.h>
Servo myservo; //creamos un objeto servo
void setup() {
myservo.attach(3); // asignamos el pin 3 al servo.
Serial.begin(9600);
}
void loop() {
int adc = analogRead(A0); // realizamos la lectura del potenciometro
int angulo = map(adc, 0, 1023, 0, 180); // escalamos la lectura a un valor entre 0 y 180
myservo.write(angulo); // enviamos el valor escalado al servo
Serial.print("ángulo: ");
Serial.println(angulo);
delay(10);
}